
Лекция 3
Теория сигналов
1)
Базовые модели
сигналов
- описывание сигналов кок
функция времени
Колебания могут быть
дискретными и случайными
а) гармоническое колебание
![]()
б) функция Хевисайда
![]()
![]()
![]()
![]()
![]()

в)
![]() - функция Дирака
- функция Дирака

 -выражение
-выражение
![]() - функции
- функции

Строб – короткий импульс.
Связь функции Хавасайда и
![]() - функции :
- функции :


Все 3 колебания являются пробными
функциями и используются для представления сигнала (ряд Фурье)
Динамическое представление сигналов
1) Представление
![]() - функуии
- функуии


 - динамическое
представление сигнала функцией Хавасайда
- динамическое
представление сигнала функцией Хавасайда
 - общий случай
- общий случай
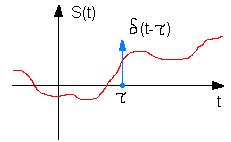
2)
Представление
![]() - функуии
- функуии

![]()
![]()


![]() - функция S в момент времени
- функция S в момент времени
![]()
![]() - ширина
прямоугольника
- ширина
прямоугольника
- Динамическое представление
сигнала с помощью дельна функции
Пространство сигналов
1)
Аксиомы линейного
пространства
Пусть
есть некоторое множество М – векторов и на нём определена операция сложения . Множество относительно сложению должно быть замкнуто, т.
е. :
![]()
Пример:

Нужно
установить взаимнооднозначную связь между множества
векторов и множества сигналов

A1. ассоциативность:
![]()
А2. существование
нулевого элемента
![]()
А3. существование обратного элемента:
![]()
А4. коммутативность:
![]()
А1,А2,А3
– группа аксиом , А4 – абелева группа
К
– поле скаляров
Поле – множество, которое является
коммутативным относительно чисел, а такие коммутационной группой относительно
умножения (за исключением существования элемента обратным относительно
умножению для нуля).
R – поле вещественных чисел
С
– поле комплексных чисел
GF = {0;1} - поле
Галуа

![]()
Б1. Ассоциативность
умножения на скаляр
![]()
Б2. Существование 0 и
1
![]()
Б3. Существование единичного вектора
![]()
Б4. Дистрибутивность
![]()
![]()
Все
это есть векторное пространство
Пример:

| Лекция 2 | Лекция 4 |
|---|